- +1246
智能駕駛生死時(shí)速,能否成功“渡劫”?

明天和意外,永遠(yuǎn)不知道哪個(gè)先來(lái)。
近日,安徽銅陵德上高速一場(chǎng)致命事故讓公眾和媒體關(guān)注的一切焦點(diǎn)都指向了智能駕駛。之后,有網(wǎng)友途經(jīng)安徽高速時(shí)發(fā)現(xiàn)警示牌改成了“高速路況復(fù)雜,勿用智能輔助駕駛”。
智駕技術(shù)的迅猛發(fā)展,正在改變?nèi)藗兊某鲂蟹绞健?024年,中國(guó)乘用車L2級(jí)及以上自動(dòng)駕駛的滲透率達(dá)55.7%,中國(guó)電動(dòng)汽車百人會(huì)副理事長(zhǎng)兼秘書(shū)長(zhǎng)張永偉預(yù)計(jì)這一數(shù)字到2025年可能會(huì)接近65%。
然而,當(dāng)智能汽車駛?cè)肭Ъ胰f(wàn)戶,技術(shù)的“烏托邦”承諾卻在現(xiàn)實(shí)中一次次被擊碎,也給被熱炒的全民智駕澆了一盆冷水。

全球智駕第一命案
很多人或許早已經(jīng)忘了,距離全球智駕第一次命案發(fā)生,已經(jīng)過(guò)去了足足9年。
2016年5月7日,在美國(guó)佛羅里達(dá)州,40歲的Joshua Brown在駕駛特斯拉Model S時(shí)啟用了Autopilot系統(tǒng),但在陽(yáng)光直射下,Autopilot未能識(shí)別到一輛橫穿馬路的白色大貨車,導(dǎo)致車輛以約117公里/小時(shí)的速度撞上了卡車,低矮的車身直接鉆到卡車掛車底部,Joshua Brown不幸身亡?。

這是美國(guó)首例涉及汽車智能駕駛功能的交通死亡事故,也是全球智駕第一命案。美國(guó)國(guó)家公路交通安全管理局(NHTSA)的調(diào)查報(bào)告顯示,發(fā)生撞擊時(shí),車輛的Autopilot自動(dòng)駕駛系統(tǒng)正處于開(kāi)啟狀態(tài),由于受到強(qiáng)烈光照干擾,系統(tǒng)未能正確識(shí)別出白色車身的卡車,誤將卡車判定為路標(biāo),剎車功能沒(méi)有及時(shí)啟動(dòng),車主也沒(méi)有采取剎車、轉(zhuǎn)向或其他動(dòng)作避免撞車,從而導(dǎo)致事故發(fā)生。這次事件促使特斯拉對(duì)Autopilot系統(tǒng)進(jìn)行了改進(jìn),并加強(qiáng)了相關(guān)功能的測(cè)試和驗(yàn)證?。
而國(guó)內(nèi),由智駕引發(fā)的安全風(fēng)險(xiǎn)也不在少數(shù)。今年2月,浙江溫州車主曾發(fā)文稱,在高速上使用智駕時(shí),系統(tǒng)未識(shí)別路障桶撞上施工車險(xiǎn)些側(cè)翻。3月20日,高速交警高密大隊(duì)接到報(bào)警稱,駕駛員駕車行駛至青銀高速青島方向84公里處發(fā)生事故。經(jīng)調(diào)查,該車駕駛員開(kāi)啟了車輛的智駕功能,而車輛智能駕駛功能對(duì)于錐桶的識(shí)別能力較弱,同時(shí)該駕駛員分心駕駛,疏于觀察路面,致使該車輛行駛至該施工路段時(shí)撞上施工單位的錐桶。
中國(guó)電動(dòng)汽車百人會(huì)副秘書(shū)長(zhǎng)師建華表示,2024年L2級(jí)輔助駕駛滲透率超過(guò)了55%,NOA滲透率達(dá)到11%,消費(fèi)者對(duì)汽車智能化的需求不僅是“有沒(méi)有”,而轉(zhuǎn)向了“好不好用”的階段。從未來(lái)看,端到端的智能駕駛(城市NOA)也會(huì)加速普及,預(yù)計(jì)今年滲透率將達(dá)到20%。
智能駕駛的萌芽可以追溯到1920年代,但商業(yè)化始于特斯拉,其于2014年推出了Autopilot系統(tǒng),這是首款量產(chǎn)車搭載的L2級(jí)智能駕駛系統(tǒng)。
智駕系統(tǒng)首先是通過(guò)多種傳感器實(shí)時(shí)收集周圍環(huán)境信息,一般包括激光雷達(dá)、毫米級(jí)光波雷達(dá)、可見(jiàn)光攝像機(jī)、加速度傳感器等,以獲取車輛周圍的圖像、聲音、深度和距離等信息。

基于環(huán)境感知結(jié)果,智駕系統(tǒng)運(yùn)用高級(jí)算法進(jìn)行路徑規(guī)劃,并在不同情境下做出決策,這些決策包括但不限于避障、遵守交通規(guī)則、變換車道、停車或加速等,并最終轉(zhuǎn)化為具體的車輛動(dòng)作指令,通過(guò)電子控制系統(tǒng),發(fā)送給汽車的動(dòng)力系統(tǒng)、制動(dòng)系統(tǒng)、轉(zhuǎn)向系統(tǒng)等,從而完成智能駕駛輔助。
輔助駕駛商業(yè)化至今時(shí)間并不長(zhǎng),雖然它正成為很重要的競(jìng)爭(zhēng)力,但不可否認(rèn)的是,其智能化程度距離人們的期望還有較大差距,效率與安全的天平仍難平衡,這也是全球各國(guó)政策對(duì)輔助駕駛?cè)猿直J貞B(tài)度的重要原因。
智能駕駛的灰區(qū)和死角
當(dāng)智駕技術(shù)被車企賦予“完美”的光環(huán),人們往往會(huì)忽略技術(shù)的本質(zhì)仍然只是操作工具。目前,智駕技術(shù)存在的主要局限包括算法局限、感知局限以及人機(jī)交互的響應(yīng)時(shí)差等問(wèn)題?。這些局限導(dǎo)致了智駕系統(tǒng)在復(fù)雜場(chǎng)景下的表現(xiàn)不如預(yù)期,甚至可能引發(fā)安全事故。
首先,算法缺陷?是智駕系統(tǒng)面臨的一個(gè)重要問(wèn)題。當(dāng)前大多數(shù)智駕系統(tǒng)仍處于L2-L3級(jí)別的輔助駕駛階段,主要依賴高精地圖和固定規(guī)則進(jìn)行決策,對(duì)于臨時(shí)施工、極端天氣等動(dòng)態(tài)場(chǎng)景的處理能力有限。
此次交通事故正是由于施工修繕,自車道用路障封閉,車輛需改道至逆向車道,由于在施工改道場(chǎng)景下未能識(shí)別逆向車道的水泥隔離墩?,導(dǎo)致碰撞事故?。這類非常規(guī)路況的“長(zhǎng)尾”場(chǎng)景正是當(dāng)前L2級(jí)智駕的短板。
其次,?感知局限?也是一個(gè)顯著問(wèn)題。智駕系統(tǒng)主要依賴攝像頭和雷達(dá)進(jìn)行感知,但在復(fù)雜環(huán)境下可能無(wú)法準(zhǔn)確識(shí)別障礙物。
目前,智駕環(huán)境感知的主要手段是純視覺(jué)算法或視覺(jué)+激光雷達(dá)。
純視覺(jué)算法將攝像頭作為主要硬件設(shè)備,相對(duì)激光雷達(dá)而言成本低廉,這使得搭載純視覺(jué)算法的智能駕駛方案在大規(guī)模應(yīng)用時(shí)更具成本效益。視覺(jué)系統(tǒng)能夠捕捉到豐富的紋理、顏色等信息,對(duì)于識(shí)別交通標(biāo)志、車道線、行人面部表情和車輛外觀等具有天然的優(yōu)勢(shì),可以為自動(dòng)駕駛車輛提供大量的語(yǔ)義信息。
但是,純視覺(jué)算法受環(huán)境影響較大,在特定天氣條件下,如暴雨、濃霧、大雪、強(qiáng)光直射、反光等,圖像質(zhì)量會(huì)嚴(yán)重下降,導(dǎo)致識(shí)別精度降低甚至失效,以及在出隧道、地下車庫(kù)等光線劇烈變化的場(chǎng)景下需要復(fù)雜的光學(xué)號(hào)處理,影響對(duì)道路和周圍物體的識(shí)別。
有數(shù)據(jù)顯示,智駕系統(tǒng)在雨霧天氣的障礙物識(shí)別準(zhǔn)確率下降42%,AEB(自動(dòng)緊急制動(dòng))響應(yīng)距離縮短37%。

深度感知能力有限和對(duì)遮擋敏感也是純視覺(jué)的短板。當(dāng)物體被部分遮擋時(shí),純視覺(jué)算法可能無(wú)法準(zhǔn)確識(shí)別整個(gè)物體,從而影響對(duì)場(chǎng)景的理解和判斷。
激光雷達(dá)是一種用于精確獲得三維位置信息的傳感器,通過(guò)發(fā)射和接收激光束,獲 取空間的位置點(diǎn)信息(即點(diǎn)云),并根據(jù)這些信息進(jìn)行三維建模,可以確定目標(biāo)的位置、 大小、外部輪廓等。
它與其它傳感器互為補(bǔ)充,可以很好地彌補(bǔ)純視覺(jué)方案下的缺點(diǎn),直接獲取三維信息,同時(shí)純視覺(jué)方案仍具有瓶頸,且需要大量數(shù)據(jù)積累和處理,以及強(qiáng)大的算力算法支持,激光雷達(dá)則可以大幅提升車輛對(duì)于周圍環(huán)境感知的準(zhǔn)確度,降低高等級(jí)智能駕駛對(duì)算法的要求,是智能駕駛?cè)诤细兄桨覆豢扇鄙俚囊画h(huán)。
不過(guò),常規(guī)激光雷達(dá)在側(cè)向感知方面仍然存在不足。以常規(guī)激光雷達(dá)水平視場(chǎng)角為120°計(jì)算,相鄰車道車輛超車切入在車頭超過(guò)3.5m時(shí)才能探測(cè)到,極易發(fā)生剮蹭。
其次,激光雷達(dá)對(duì)低矮物的探測(cè)感知不足,由于主激光雷達(dá)垂直視場(chǎng)角的限制,存在著前向3m~7m的視覺(jué)盲區(qū),對(duì)于側(cè)面矮小障礙物和移動(dòng)物體,智駕系統(tǒng)無(wú)法感知。此外,激光雷達(dá)對(duì)道路周邊靜態(tài)物識(shí)別不足,在車道線模糊的路段,容易規(guī)劃出波動(dòng)較大的軌跡線,影響駕駛體驗(yàn)。
此次事故中的車型采用雙目純視覺(jué)智駕方案,目前業(yè)界主流的雙目視覺(jué)智駕方案最大可探測(cè)距離約在200米左右,顯著低于三目攝像頭視覺(jué)方案(約300米-350米)或激光雷達(dá)(約250米-500米)的有效探測(cè)距離,這也導(dǎo)致事故中從智駕報(bào)警提示駕駛員接管到車輛僅有短短2秒。
異形障礙物識(shí)別缺陷也是智駕的一大挑戰(zhàn)。對(duì)于臨時(shí)路障、水馬、消防栓等非標(biāo)準(zhǔn)物體的識(shí)別,智駕系統(tǒng)容易存在盲區(qū)。純視覺(jué)方案依賴圖像語(yǔ)義分割,對(duì)不規(guī)則物體的特征提取存在誤差;而多傳感器融合則可能因數(shù)據(jù)時(shí)空對(duì)齊問(wèn)題導(dǎo)致誤判。
?人機(jī)交互的響應(yīng)時(shí)差?也是一個(gè)重要問(wèn)題。德國(guó)全德汽車俱樂(lè)部的測(cè)試結(jié)果表明,駕駛員平均需2.3 秒才能完成有效接管,高速公路場(chǎng)景下這一時(shí)間甚至延長(zhǎng)至2.6秒。不同駕駛?cè)藛T情況也不相同,部分駕駛員可能因疲勞、分心或注意力不集中而導(dǎo)致接管延遲。
清華大學(xué)車輛學(xué)院教授李升波也指出,駕駛員從“感知異常”到“完成轉(zhuǎn)向+制動(dòng)”的平均反應(yīng)時(shí)間為2.6秒,而當(dāng)前主流L2級(jí)自動(dòng)駕駛在突發(fā)場(chǎng)景下留給用戶的接管時(shí)間僅有1.5秒-2秒。
現(xiàn)在有針對(duì)L3級(jí)自動(dòng)駕駛的TTC(碰撞時(shí)間,計(jì)算車輛與前方障礙物發(fā)生碰撞所需的時(shí)間)國(guó)際標(biāo)準(zhǔn),要求智駕系統(tǒng)從發(fā)出預(yù)警到駕駛員成功接管應(yīng)有10秒的TTC時(shí)間。但對(duì)于L2+輔助駕駛沒(méi)有強(qiáng)制性要求。
不過(guò),要在高速場(chǎng)景實(shí)現(xiàn)10秒的TTC時(shí)間相當(dāng)困難,這意味著智駕系統(tǒng)需要提前10秒就檢測(cè)到障礙物并告知駕駛?cè)耍挚简?yàn)車企的感知能力。假如時(shí)速達(dá)到100km/h以上,智駕系統(tǒng)要提前300到400米識(shí)別到障礙物才能滿足要求,目前只有高線束激光雷達(dá)能實(shí)現(xiàn)300米以上的探測(cè)距離,普通乘用車一般不會(huì)搭載。
同時(shí),田豐指出,目前大多數(shù)車企的智駕系統(tǒng)都未能達(dá)標(biāo)——以120km/小時(shí)的時(shí)速計(jì)算,僅依賴毫米波雷達(dá)的系統(tǒng)從識(shí)別到剎停的理論極限時(shí)間僅6秒,存在4秒的安全缺口。
從智能駕駛主要的兩種技術(shù)路線看,一些技術(shù)缺陷目前仍然難以有效根除。
一種是“規(guī)則派”。汽車的感知、決策、執(zhí)行都依賴人類工程師預(yù)先編寫(xiě)好的規(guī)則,這些規(guī)則存在于一行行代碼中,代碼數(shù)量會(huì)多達(dá)數(shù)十萬(wàn)行。
這個(gè)流派的主要缺陷有兩種。一是會(huì)面臨無(wú)窮無(wú)盡的“長(zhǎng)尾問(wèn)題”。在現(xiàn)實(shí)環(huán)境中開(kāi)車,會(huì)面對(duì)各種各樣的場(chǎng)景,就算模型中預(yù)設(shè)好了99.9%的規(guī)則,剩下的0.1%罕見(jiàn)場(chǎng)景還是無(wú)法合理應(yīng)對(duì),導(dǎo)致智駕仍有大量潛在風(fēng)險(xiǎn)。
二是代碼錯(cuò)誤。人類工程師編寫(xiě)代碼難免出錯(cuò),在幾十萬(wàn)行的代碼中不可能沒(méi)有錯(cuò)誤代碼,你不知道那些隱藏著的錯(cuò)誤代碼什么時(shí)候會(huì)“爆雷”,引發(fā)車輛失控等嚴(yán)重后果。
另一個(gè)流派是Transformer。在過(guò)去5年中,Transformer深度學(xué)習(xí)構(gòu)架徹底改變了人工智能。Transformer開(kāi)啟了生成式AI新時(shí)代,現(xiàn)在那些備受推崇的AI模型和產(chǎn)品——聊天機(jī)器人ChatGPT、圖像生成工具M(jìn)idjourney、視頻生成工具Sora等等,都是基于Transformer構(gòu)建的。
在智能駕駛領(lǐng)域,視覺(jué)Transformer也公認(rèn)是最有前途的研究方向,特斯拉2021年發(fā)布的FSD應(yīng)用了Transformer架構(gòu),國(guó)內(nèi)很多廠商也隨后加入這一賽道。
Transformer看上去前途無(wú)量,但也遠(yuǎn)談不上完美。它效率更高,擴(kuò)展性和通用性更好,但訓(xùn)練模型需要消耗巨量的算力,特斯拉擁有的算力已經(jīng)是其它車企的數(shù)倍,但這遠(yuǎn)遠(yuǎn)不夠,成為智能駕駛一道難以逾越的門檻。
另一個(gè)障礙是“黑盒問(wèn)題”。基于Transformer的模型都是“黑盒”,它們的內(nèi)部運(yùn)作過(guò)于復(fù)雜和不透明,人類無(wú)法準(zhǔn)確理解它們的行為方式。這也就意味著,如果模型偶爾輸出了一個(gè)異常結(jié)果,人類也束手無(wú)策。
“黑盒問(wèn)題”可能會(huì)讓ChatGPT說(shuō)出一句不著四六的話,也可能讓Midjourney輸出一張古怪的圖像,你可以對(duì)這個(gè)結(jié)果付之一笑。但如果汽車智駕系統(tǒng)突然出現(xiàn)幽靈剎車、意外加速、錯(cuò)誤轉(zhuǎn)向,誰(shuí)能笑得出來(lái)?
Transformer也許能把汽車自動(dòng)駕駛帶上金光大道,也許它也只是個(gè)過(guò)渡性技術(shù),一切尚未明了。
這些現(xiàn)實(shí)技術(shù)缺陷折射出當(dāng)前智駕落地的共性風(fēng)險(xiǎn)——系統(tǒng)和算法在99%常規(guī)場(chǎng)景表現(xiàn)穩(wěn)定,卻在1%的邊緣場(chǎng)景突然失效,而這1%的系統(tǒng)誤判或功能失效可能導(dǎo)致100%的風(fēng)險(xiǎn)。
技術(shù)神話的祛魅與反思
為了強(qiáng)化智能駕駛的科技感,很多車企拋棄了國(guó)際標(biāo)準(zhǔn)中的級(jí)別宣傳,故意模糊或混淆了“智能駕駛”“自動(dòng)駕駛”“輔助駕駛”的概念邊界,另辟蹊徑找到了諸如NOA(導(dǎo)航輔助駕駛)、NOP(領(lǐng)航輔助)、NGP(自動(dòng)導(dǎo)航駕駛)、NCA(城市智能駕駛)等花樣繁多的智駕系統(tǒng)名稱。
更有甚者,不少車企為了彰顯自家品牌產(chǎn)品應(yīng)對(duì)復(fù)雜路況的能力,創(chuàng)造了“車位到車位”“L2.999/L2++”等技術(shù)賣點(diǎn)營(yíng)銷詞語(yǔ),并刻意營(yíng)造出“全程零接管”“解放雙手”等假象,以塑造品牌在智駕技術(shù)上的領(lǐng)先形象。
事實(shí)上,這類宣傳本質(zhì)上是在規(guī)避智駕級(jí)別的嚴(yán)格定義。包括特斯拉FSD在內(nèi)的諸多系統(tǒng)命名,實(shí)際上既不符合國(guó)際慣例,也不符合行業(yè)標(biāo)準(zhǔn),本質(zhì)上都是車企的市場(chǎng)營(yíng)銷手段。
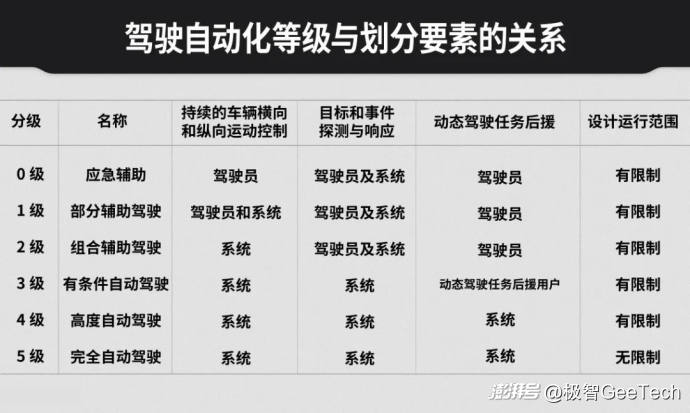
根據(jù)國(guó)際汽車工程師協(xié)會(huì)(SAE)的自動(dòng)駕駛分級(jí)標(biāo)準(zhǔn),L2級(jí)屬于“人機(jī)共駕、駕駛員全程主導(dǎo)”。也就是說(shuō),L2級(jí)系統(tǒng)借助全速自適應(yīng)巡航、車道保持、自動(dòng)泊車等功能輔助駕駛,但駕駛員需全程監(jiān)控路況,雙手不能長(zhǎng)時(shí)間離開(kāi)方向盤,屬于部分自動(dòng)駕駛。
而L3級(jí)是“系統(tǒng)主導(dǎo),駕駛員有限脫離”。在特定環(huán)境(如封閉的高速公路)下,L3級(jí)系統(tǒng)可完全接管駕駛?cè)蝿?wù),不過(guò)一旦系統(tǒng)發(fā)出接管請(qǐng)求,駕駛員必須立即響應(yīng)。可見(jiàn),L3級(jí)自動(dòng)駕駛并非完全自動(dòng)駕駛,而是“有條件的自動(dòng)駕駛”,它與L2級(jí)的核心差異體現(xiàn)在駕駛?cè)蝿?wù)的主導(dǎo)權(quán)上。
值得注意的是,在自動(dòng)駕駛各級(jí)別中,L3正是車輛駕駛權(quán)變更的關(guān)鍵分水嶺。根據(jù)工信部《汽車駕駛自動(dòng)化分級(jí)》,L3級(jí)僅允許在特定場(chǎng)景下由系統(tǒng)接管,駕駛員仍需隨時(shí)準(zhǔn)備接管。北京等地通過(guò)立法明確,未配備駕駛員或安全員的L4級(jí)車輛,事故責(zé)任由車輛管理者承擔(dān),但L3級(jí)仍以駕駛員為主責(zé)。
從人類駕駛到智能駕駛是一個(gè)漸進(jìn)的過(guò)程,而我們現(xiàn)在正處于這個(gè)過(guò)渡期。這種過(guò)渡期的特殊性,導(dǎo)致了嚴(yán)重的認(rèn)知錯(cuò)位——技術(shù)尚未成熟,消費(fèi)者卻誤以為已經(jīng)實(shí)現(xiàn);個(gè)別企業(yè)的突破,被誤解為行業(yè)的普遍水平。此次事故正是這種認(rèn)知混亂的典型寫(xiě)照。
對(duì)于智駕技術(shù),各家車企只重點(diǎn)強(qiáng)調(diào)它的正面功能,而不談其邊界在哪里,以及在什么場(chǎng)景下不推薦使用智駕。比如這次事故,純視覺(jué)方案加上時(shí)間在半夜,還是高速上,這種情況下不太適合使用智駕,如果要用的話就要一直盯著前方,雙手也不能離開(kāi)方向盤。但是對(duì)于普通消費(fèi)者來(lái)講,可能并不知道這些使用細(xì)則。
值得注意的是,德上高速的道路修繕改道,并非突發(fā)狀況。倘若能將這類路側(cè)信息傳遞給車輛,讓車輛提前了解前方路況,而非等到傳感器探知后在緊迫環(huán)境下才做出反應(yīng),那么這類悲劇或可避免。
對(duì)于如何優(yōu)化接管時(shí)間,當(dāng)前智駕對(duì)于障礙物的響應(yīng)速度一方面取決于更好的硬件(如更高清的攝像頭、更好的激光雷達(dá))以及算法迭代,例如占用網(wǎng)絡(luò)等技術(shù)使用,從而提升對(duì)異形障礙物識(shí)別能力。
另一方面,探索物理AI、感知大模型、多傳感器融合等技術(shù)的綜合應(yīng)用,以及有效的路側(cè)信息發(fā)送機(jī)制意義重大。通過(guò)將路側(cè)攝像頭、車載雷達(dá)、激光雷達(dá)等多種傳感器的數(shù)據(jù)進(jìn)行整合,并對(duì)交通環(huán)境動(dòng)態(tài)數(shù)據(jù)進(jìn)行實(shí)時(shí)分析,從而提供更全面、更精準(zhǔn)的交通環(huán)境感知,有助于車輛根據(jù)當(dāng)前交通態(tài)勢(shì)做出合理決策。同時(shí),通過(guò)把路障位置、作業(yè)改道等信息上傳至云端平臺(tái),并推送至車輛,實(shí)現(xiàn)車輛、路側(cè)與云端的三端聯(lián)動(dòng),可以大幅降低交通事故發(fā)生概率 。
過(guò)去9年間,隨著智駕技術(shù)越來(lái)越先進(jìn),不僅能夠適應(yīng)更多路況,也能夠展現(xiàn)出更類似于真人的駕駛能力。但我們要清楚的是,智駕系統(tǒng)只是看到了龐雜交通體系中的“局部真相”,難以覆蓋所有長(zhǎng)尾場(chǎng)景,不時(shí)也會(huì)發(fā)生誤判、失效等風(fēng)險(xiǎn)。作為一個(gè)理性駕駛者,應(yīng)該懂得如何把握技術(shù)便利性與安全性之間的尺度。
這場(chǎng)悲劇讓人想起《流浪地球》里的一句臺(tái)詞:“沒(méi)有人類的文明毫無(wú)意義”。如今,再回看王傳福的那句:“安全是電動(dòng)車最大的豪華,智駕是安全出行最強(qiáng)的守護(hù)”,或許有了更多的意味。汽車的根本屬性是交通工具,把乘客安全送達(dá)目的地是終極目標(biāo)。當(dāng)安全這個(gè)“1”蕩然無(wú)存,后面再智能的系統(tǒng)也將變得毫無(wú)價(jià)值。
真正的智能駕駛革命,不在于參數(shù)競(jìng)賽與資本游戲,而在于對(duì)生命的敬畏,唯有將生命權(quán)置于技術(shù)敘事之上,智駕才能真正從營(yíng)銷噱頭進(jìn)化為社會(huì)福祉。否則,每一次事故,都在擊穿公眾對(duì)智駕的信任底線,最終將演變成壓垮行業(yè)的最后一根稻草。
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。







- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司