- +1
TeleAI提出自主水下航行器光學導引定位新方法
地球是一個被水覆蓋的行星,表面約71%是海洋。大海不僅面積廣闊,而且深不可測,其中物種多樣,礦產豐富。百年來,人類從未停止對大海的認知和探索。
從海平面到水下1000米是臨地空間的一部分。在這個區域中,物種的多樣性構成了復雜的生態系統和豐富的海產資源,它將是人類活動“向下”拓展的重要空間。
然而,由于海水的不均勻特性,光線會被吸收和散射。因此,“智能光電”技術應運而生,可以實現在暗淡的環境中對光信號進行探測、傳輸,及智能化感知和分析。
中國電信人工智能研究院(TeleAI)正在加速推進“智能光電”技術的研究工作,并與智能體、智傳網(AI Flow)、AI治理形成“三智”+“一治”的完整戰略布局。

臨地空間與人們的現實生活緊密相關,TeleAI希望通過AI驅動包括賽博空間、臨地空間、廣域空間在內的“三大空間經濟”發展,進一步拓展人類的活動范圍。
隨著機械工程、計算機、人工智能等技術的突飛猛進,自主水下航行器(Autonomous Underwater Vehicle,AUV)的應用得到進一步發展。
從深海進入到深海開發,AUV扮演著至關重要的角色。AUV能夠自主航行進入更深的水域空間,無需通過臍帶電纜與其他平臺連接,就能執行各種任務。
然而,由于AUV造價昂貴,且攜帶大量珍貴的海洋數據,在完成任務后,通常需要以“導引回收”的方式使其安全返航,保障數據完整,并實現設備的重復利用。
為了提高AUV末端光學導引回收的精度,中國電信CTO、首席科學家、中國電信人工智能研究院(TeleAI)院長李學龍教授帶領團隊展開深入研究,提出了“自主水下航行器多分支網絡光學導引定位方法”。
該方法旨在為AUV在能源補充、數據傳輸和指令下達等方面提供更快的解算速度、較低的算力功耗需求以及較少的能量消耗。
相關論文已在中國精品期刊《中國科學:信息科學》正式發表。
論文地址:
https://www.sciengine.com/SSI/doi/10.1360/SSI-2024-0183;JSESSION>
突破與創新
團隊搭建了基于多象限測角的光學導引定位硬件系統,提出了多分支回歸網絡的AUV光學導引定位方法。
該方法首次將深度網絡引入多象限測角的光學導引定位位置解算任務中,設計了多分支結構的位置解算回歸網絡。研究了數據驅動的多維度定位約束訓練方法,構建了水下光學導引定位系統的物理幾何關系,實現光學導引硬件與算法的一體化設計。通過解算多象限光電探測器采集的導引燈偏角數據,獲取了AUV與導引燈的相對位置,實時輸出AUV的即時位置坐標,完成了海試驗證。

AUV導引定位系統示意圖
創新點1:導引硬件與算法一體化設計
為了實現水下光學導引大視角的高精度定位,團隊采用了多象限光電探測器,分析了導引燈組排布與AUV的物理幾何關系,建立了光學導引偏角-位置的數學模型。
從導引燈的幾何排布角度出發,在理論上證明了使用三個非共線排布的導引燈可以確保導引燈偏角數據與AUV位置(簡稱偏角-位置)的一一對應關系,是保證在算法層面產生唯一位置真值解的重要前提條件。
創新點2:多分支結構的位置解算回歸網絡
為了提升模型的表示能力,團隊設計了多分支結構的位置解算回歸網絡,通過多象限光電探測器獲取的導引燈偏角信息,將AUV位置解算的任務視為回歸問題,采用了編解碼器結構,提高了位置解算精度和速度。
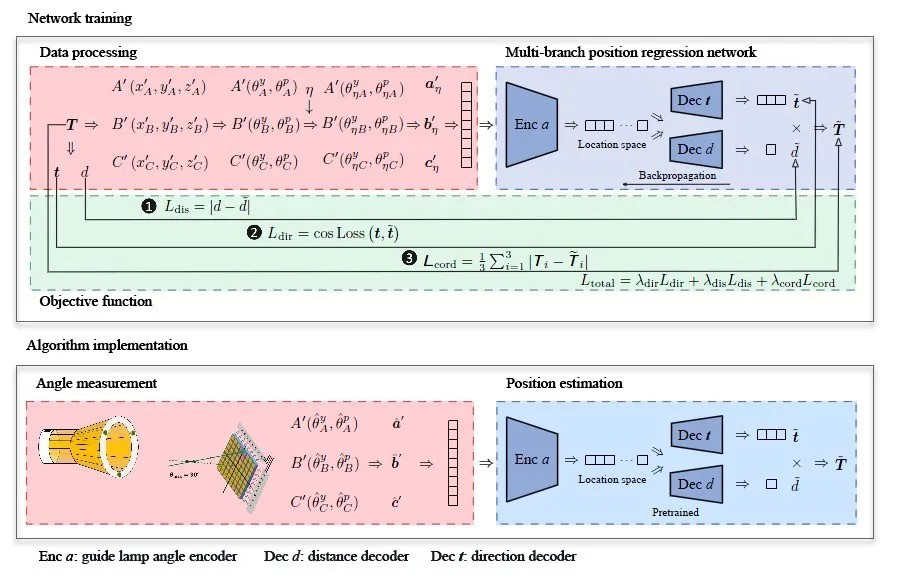
AUV多分支網絡光學導引定位方法技術路線圖
創新點3:多維度的空間位置約束目標函數
為了更高效地指導網絡模型參數優化,團隊從方向、距離、坐標三個維度設計網絡模型目標函數,建立了多維度空間定位精度約束,進一步提高了網絡模型的解算精度和泛化能力。
實驗結果
在AUV導引回收任務中,全面評估定位精度對于確保方法效果至關重要,團隊通過在不同距離的定位精度實驗,展示本文方法在位置解算的準確性。
本文方法在0.8m至20m范圍內的坐標定位精度實驗數據如下圖所示。可以看出,絕對坐標誤差隨著距離的增加而增加,由統計分析可得,其均值58.292mm@0.8~20m,標準差為 43.347mm@0.8~20m。
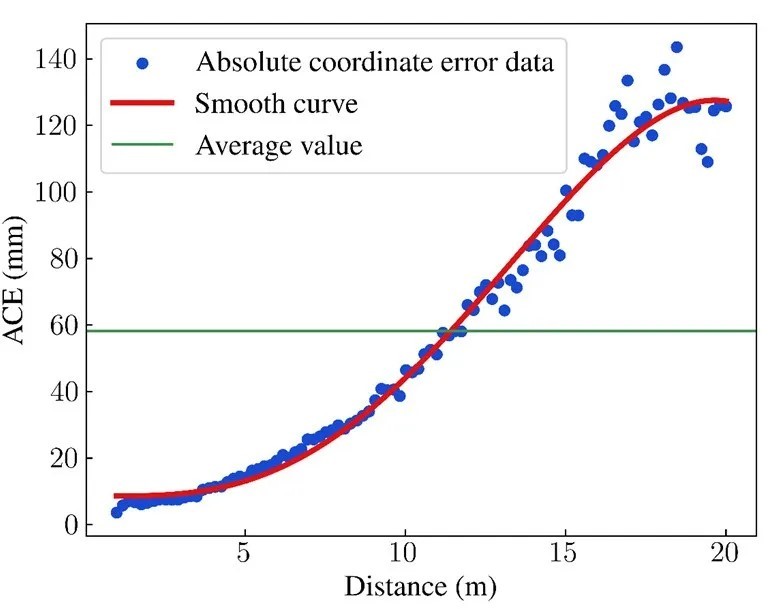
不同距離的定位精度分布圖
為了直觀展示多分支網絡光學導引定位方法的位置坐標解算精度,團隊設計了仿真軌跡以進一步測試AUV坐標預測軌跡的可視化結果。
軌跡仿真實驗中采樣了80個點,其坐標解算的絕對坐標誤差均值為41.256mm@0.8~20m,絕對坐標誤差最大值為143.847mm@0.8~20m,絕對坐標誤差最小值為3.276mm@0.8~20m。
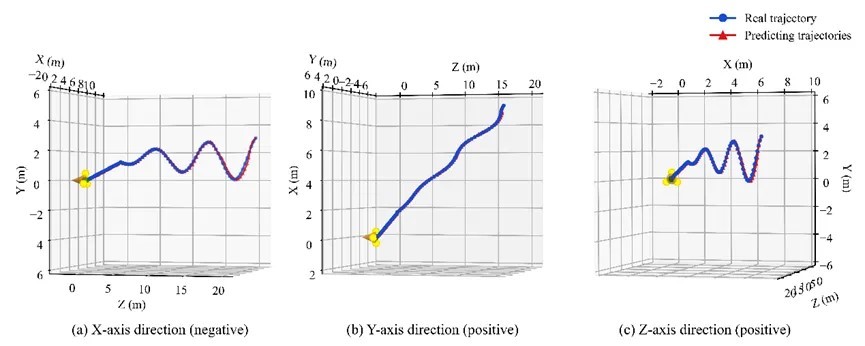
軌跡預測結果圖
在相同的驗證條件下,團隊同樣使用物理仿真隨機生成的10萬組偏角-位置數據,使用多項式回歸算法、支持向量回歸算法、決策樹算法和隨機森林回歸算法,與多分支結構的位置解算回歸網絡算法在0.8~20m的導引范圍內對定位坐標精度進行比較。
與傳統回歸算法相比,多分支結構的位置解算回歸網絡的絕對坐標誤差均值僅為58.292mm,展現出更高的定位精度。這一結果表明了多分支回歸網絡在特征提取和非線性建模上的優勢,尤其在處理復雜定位任務時,表現出了更高的定位精度。
為了驗證多分支網絡光學導引定位方法的位置解算精度,團隊在自然資源部北海海洋技術中心海港港池開展了海試驗證。三條軌跡的坐標真實值和預測值結果如下圖所示。
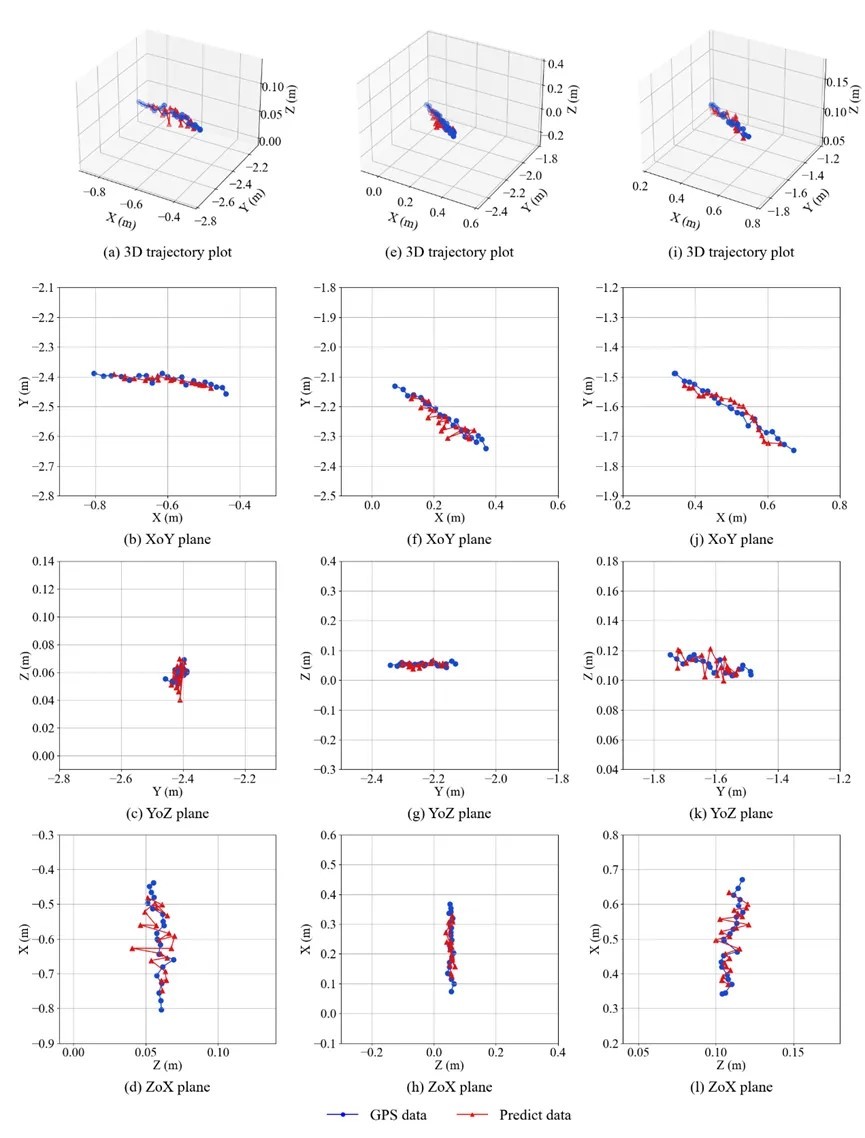
海試實驗軌跡預測結果圖
通過對絕對坐標誤差進行計算和統計,得到預測軌跡點與采集的GPS軌跡點平均絕對坐標誤差在35.102mm@1~3m,而仿真實驗的平均誤差僅為6.646mm@1~3m,與海試數據存在差距。
這是由于海試誤差除了算法本身存在的誤差以外,主要是由GPS的測量誤差和多象限光電探測器的測量誤差造成。
因此,海試中的誤差積累難以避免導致了仿真和實驗存在定位誤差差異。同時,綜合GPS和多象限光電探測器的測量誤差來看,海洋試驗的誤差仍在合理范圍內,驗證了該方法在海洋環境中仍可以實現預期的精確定位。
本文為澎湃號作者或機構在澎湃新聞上傳并發布,僅代表該作者或機構觀點,不代表澎湃新聞的觀點或立場,澎湃新聞僅提供信息發布平臺。申請澎湃號請用電腦訪問http://renzheng.thepaper.cn。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司